ROS2 Raiders

ROS2 Raiders
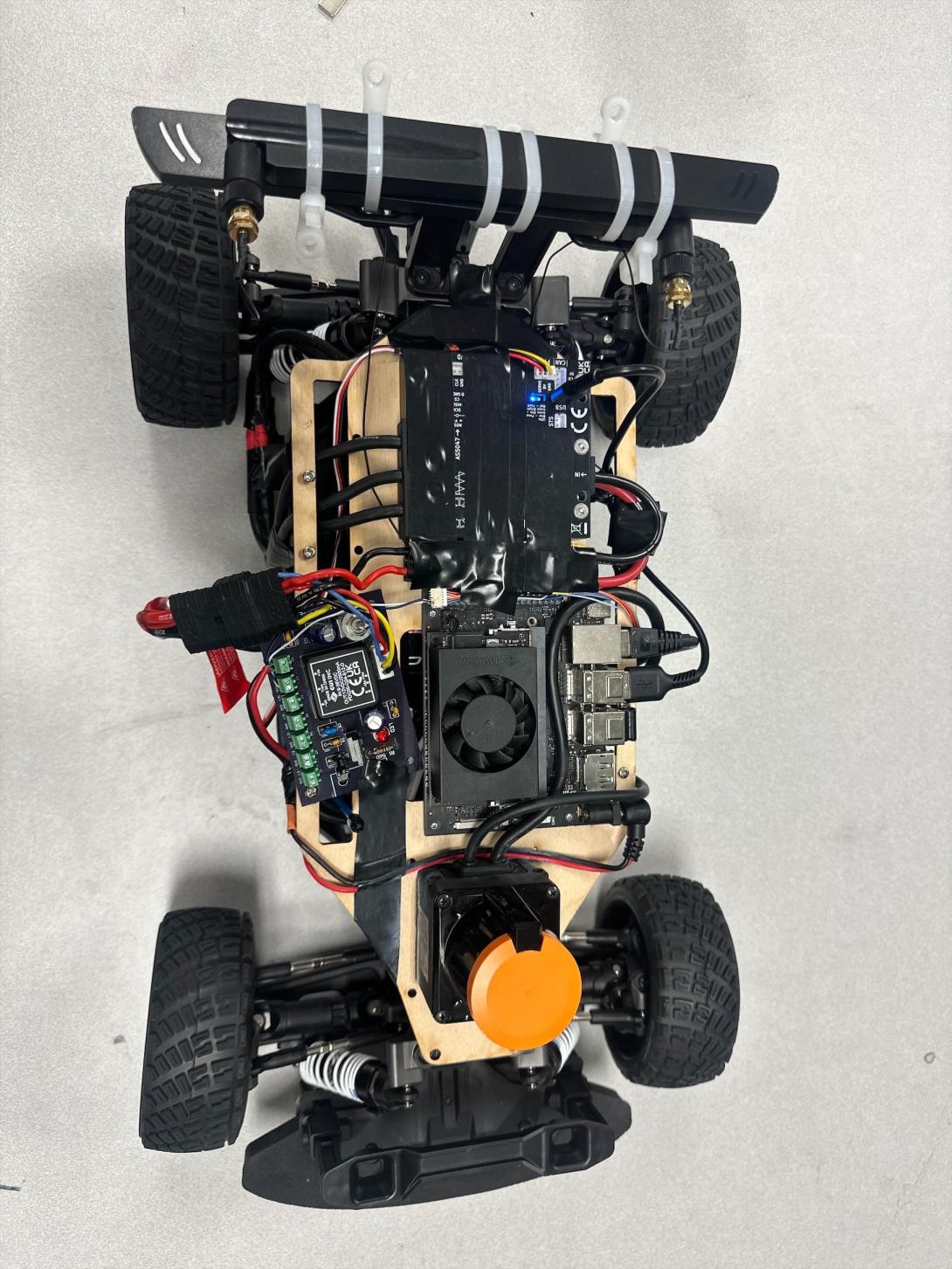
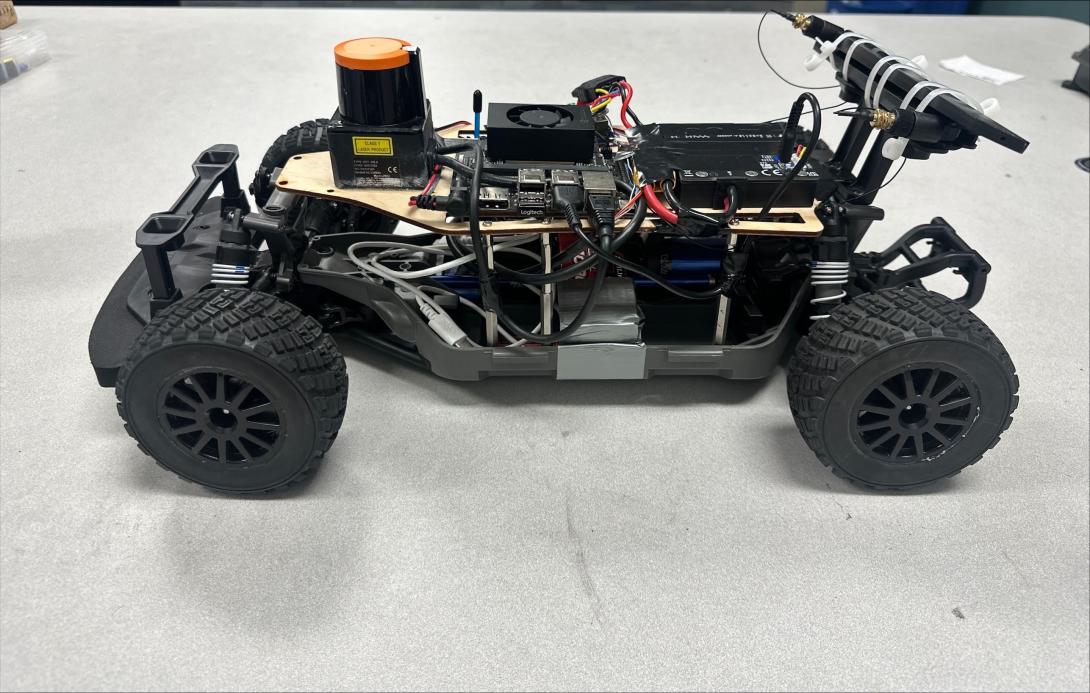
The ROS2 Raiders project centers around developing a fully autonomous 1/10th-scale race car built for the 2024–2025 F1TENTH competition. Our vehicle is equipped with the NVIDIA Jetson Orin Nano for onboard computation, the VESC MK6 for precise motor control, and a LiDAR sensor to enable real-time environmental perception. Using Robot Operating System (ROS) as the middleware, we implemented modular systems for sensing, processing, and control. The core of our autonomy stack is the disparity extender algorithm, a LiDAR-based reactive method that enables the car to avoid obstacles and navigate safely through complex track environments. Our focus is on achieving consistent, high-speed lap times while maintaining robustness against sensor noise and environmental variation. Through iterative development and simulation testing, we aim to refine our system for both accuracy and adaptability. This project showcases the practical integration of modern autonomous driving technologies in a compact and competitive format.