SkyTerra
SkyTerra
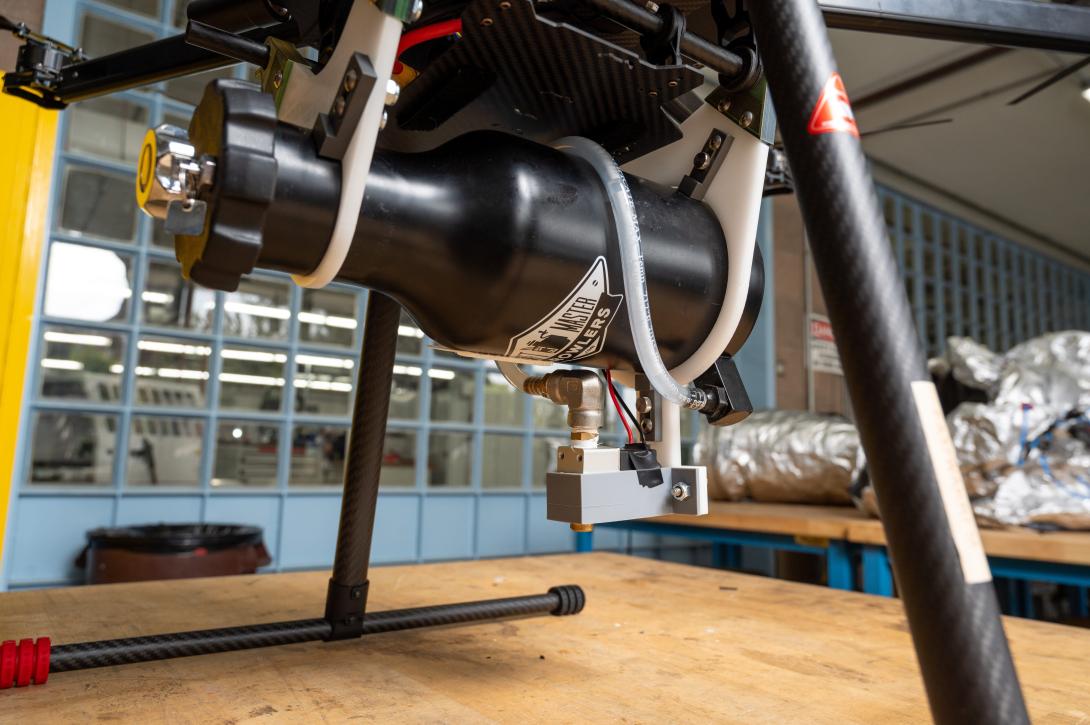
Our project seeks to innovate in the field of unmanned vehicle competitions, specifically focusing on a challenge within the Raytheon Autonomous Vehicle Competition. The central goal is to design and develop both an Unmanned Aerial Vehicle (UAV) and an Unmanned Ground Vehicle (UGV) that can autonomously perform in a dynamic, competitive environment. Our UAV will be equipped to navigate autonomously, identify targets, and deliver a payload, specifically a "Water Blast," to designated UGVs from competing teams, while avoiding our own UGV.
The project's motivation stems from the desire to push the boundaries of current unmanned vehicle technology by integrating advanced systems such as object detection, precise water delivery mechanisms, and robust autonomous mobility frameworks. Our design emphasizes the integration of a Tarot X8 drone platform with customized modifications for enhanced stability, payload capacity, and maneuverability. The objectives include achieving precise payload delivery, ensuring reliable object detection even in varied environmental conditions, and refining the autonomous navigation capabilities to handle complex, real-time strategic decision-making during the competition.