MultiCruiseR

MultiCruiseR
Developing a Transformable, Low-Redundancy, Multi-Modal Vehicle with High Energy Efficiency
Mobility is a key attribute of any unmanned vehicles: they are fundamentally mobile platforms carrying a functional payload. Aerial drones and ground rovers have distinct strengths and weaknesses in speed, endurance, safety compliance, and confined space access. It’s natural to consider a hybrid vehicle capable of selectively flying or rolling to exploit the benefits of both modes and expand its applications. However, past projects often suffered from redundant weight of parts dedicated to only one mode of operation, leading to poor mobility and energy efficiency.
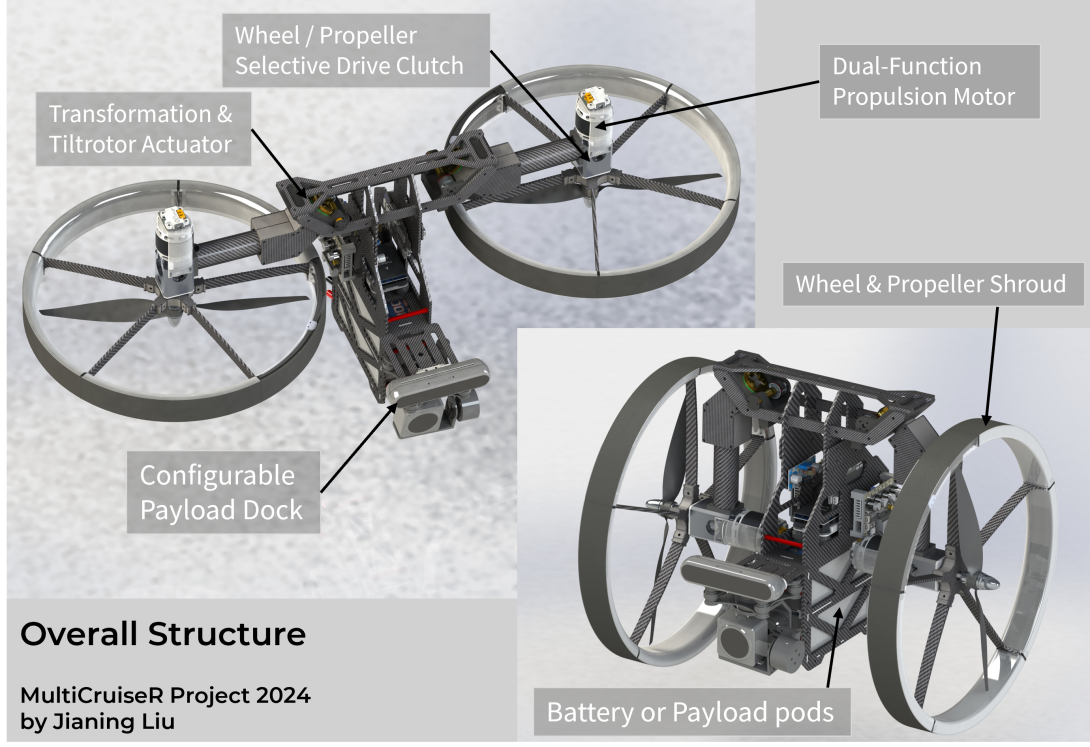
This project aims to explore the possibilities of a transformable and low-redundancy design architecture, where critical components are maximally shared for both operating modes, thereby reducing total weight and improving mobility. The highlighted innovations include:
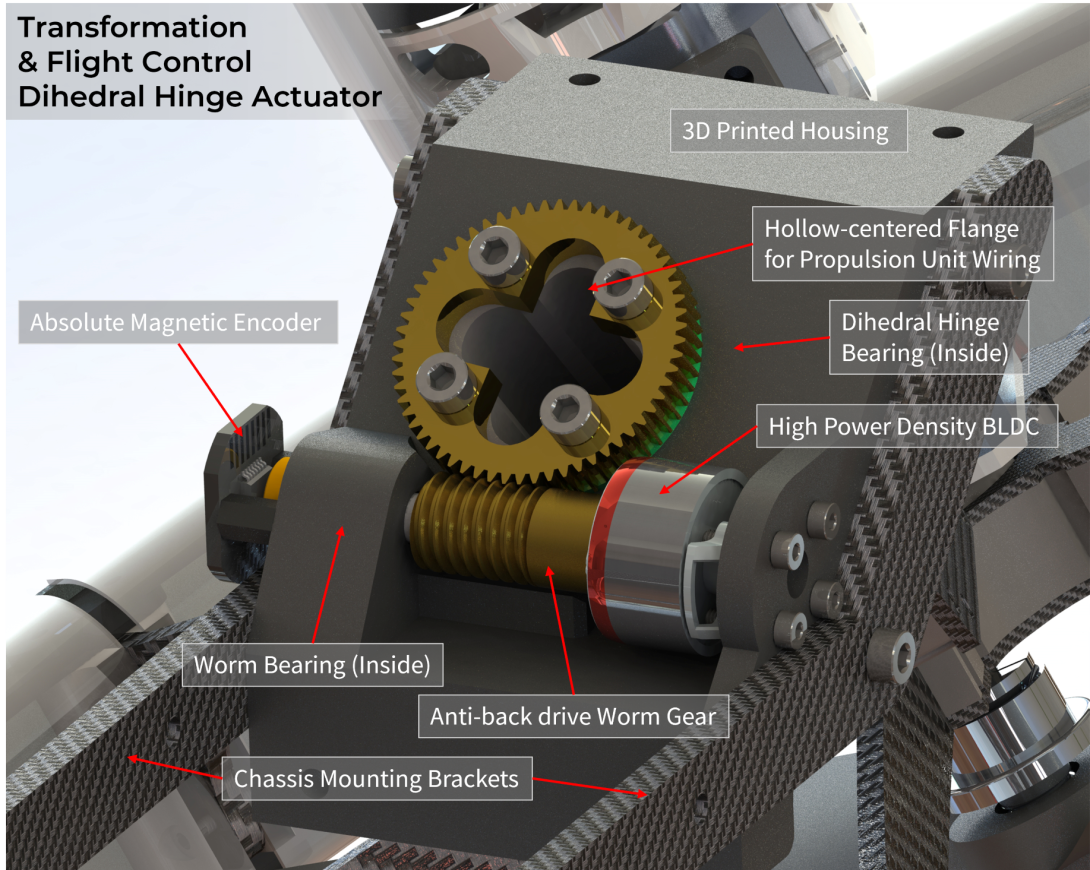
- Dual-function actuators for both transformation and tiltrotor flight control
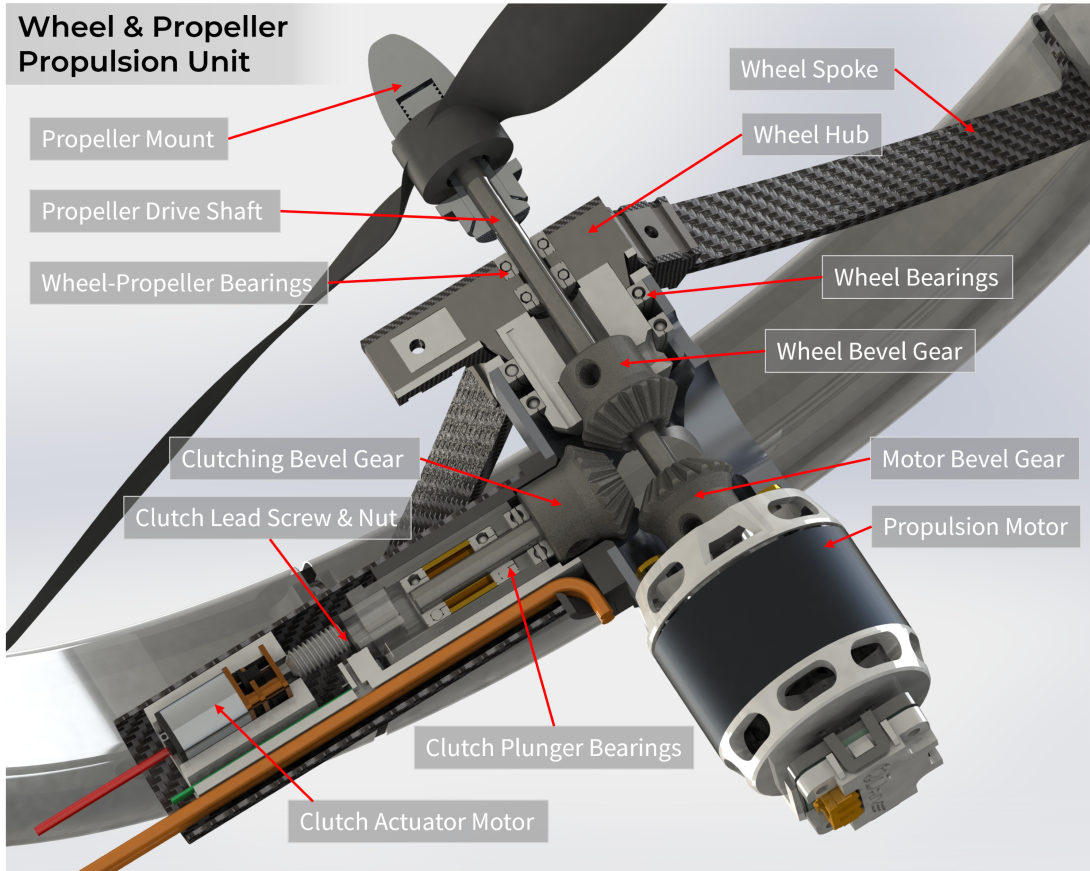
- Dual-function selective propulsion units for driving both wheel and propeller
- An unconventional Dihedral Hinge Bi-Copter frame structure
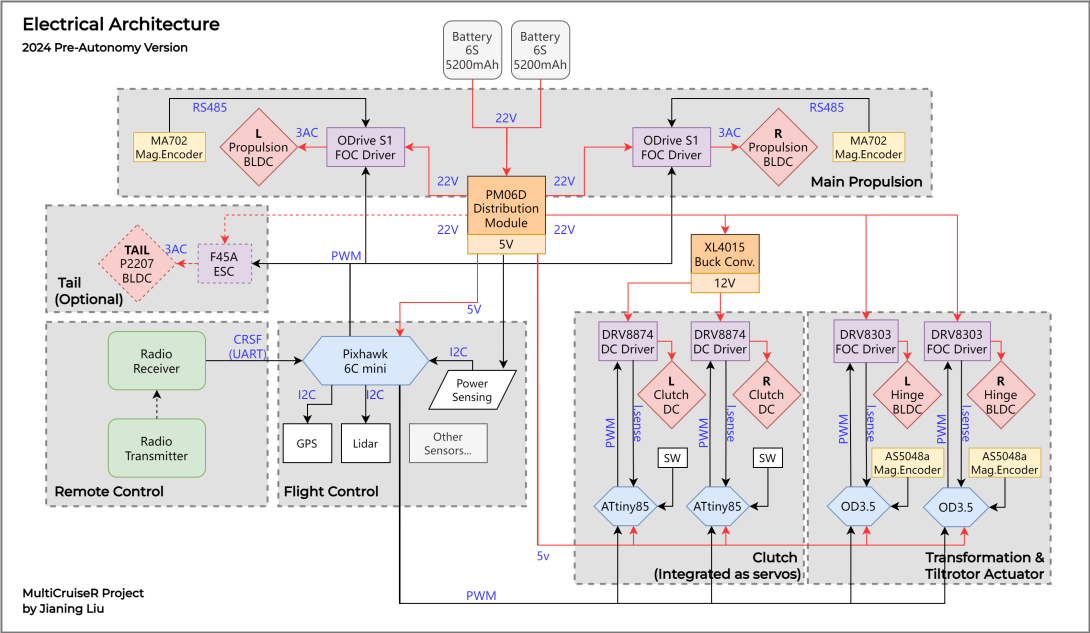
Field-Oriented Control (FOC) of BLDC motors is used to allow multiple functions of the same motor, providing precision, reliability, and efficiency.
This project is ongoing, and 2024 has mostly focused on hardware design and manufacture, subsystem tests, traditional (PID) control, and performance data collection. Various open-source resources like ArduPilot and ODrive were used for prototype testing. Future plans include implementing more original hardware and controls, with ML-based autonomy being the main long-term goal.