Mercury

Mercury
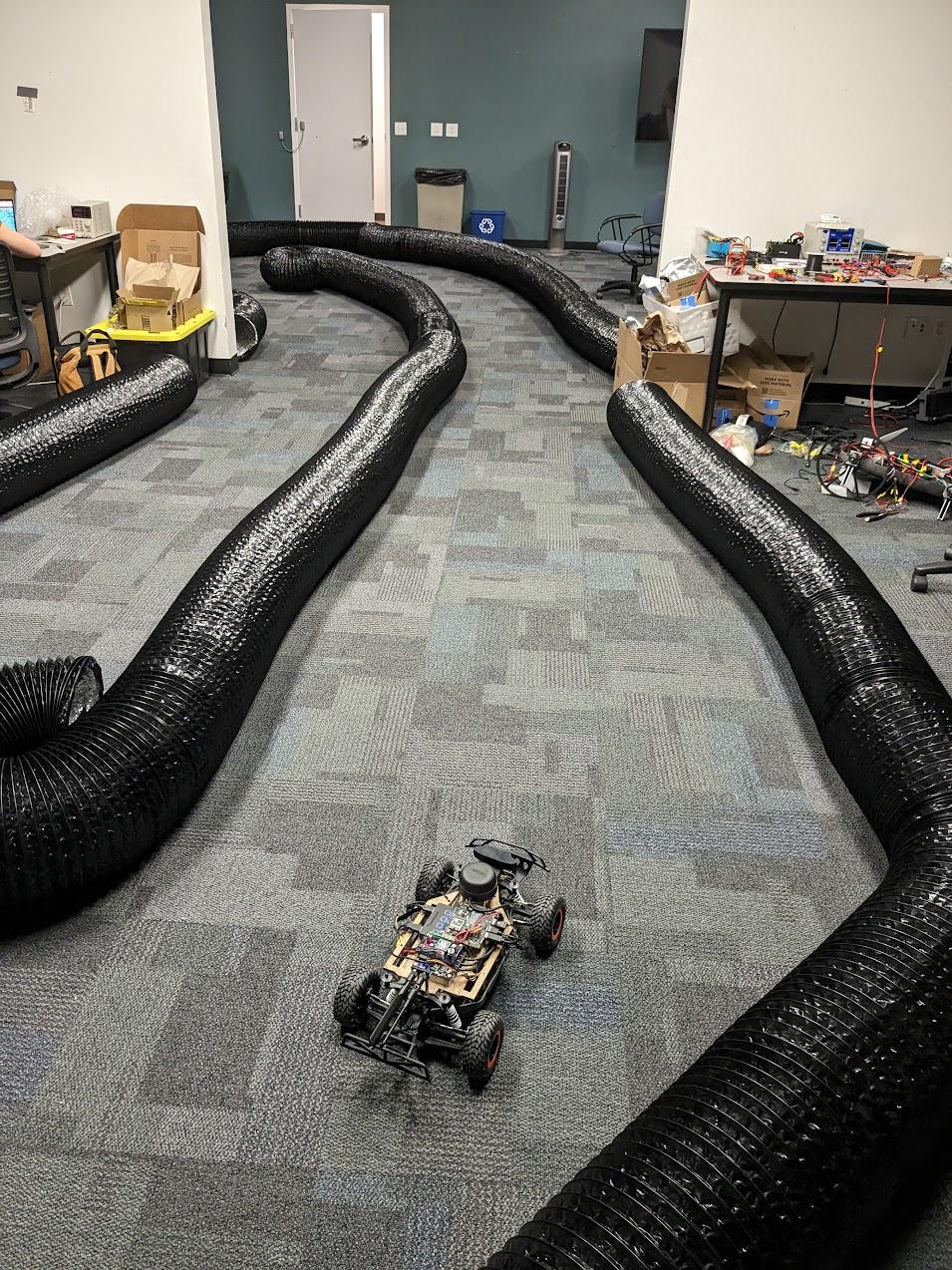
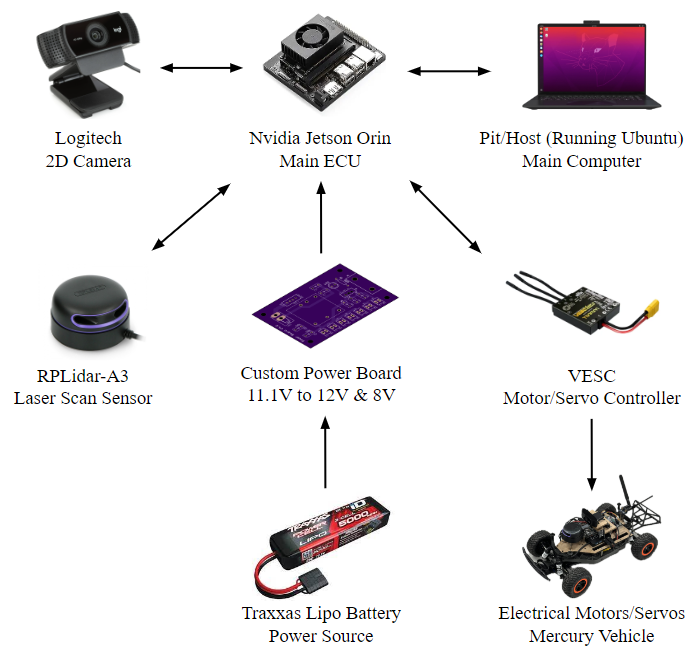
We consider an autonomous car racing setting with limited information about the racing environment thus requiring real-time localization, mapping, and control of our car when racing against opponents. We demonstrate the use of efficient navigation algorithms for autonomous car racing and obstacle avoidance when limited to onboard sensing and computation. We build off the open-source F1Tenth platform by heavily modifying a one-tenth scale remote control vehicle, thus allowing Robot Operating System (ROS) to interact with driving controls and onboard sensors simultaneously. Using LiDAR and odometry data, we use a Simultaneous Localization and Mapping algorithm to generate a map of the surroundings in real-time. The vehicle is able to accurately navigate to waypoints placed along the map, allowing smooth and efficient obstacle avoidance. We validate our algorithms in simulation as well as real-world opponent racing.