Hawkes Lab TRILOW-G
Putting down roots on the moon
Description
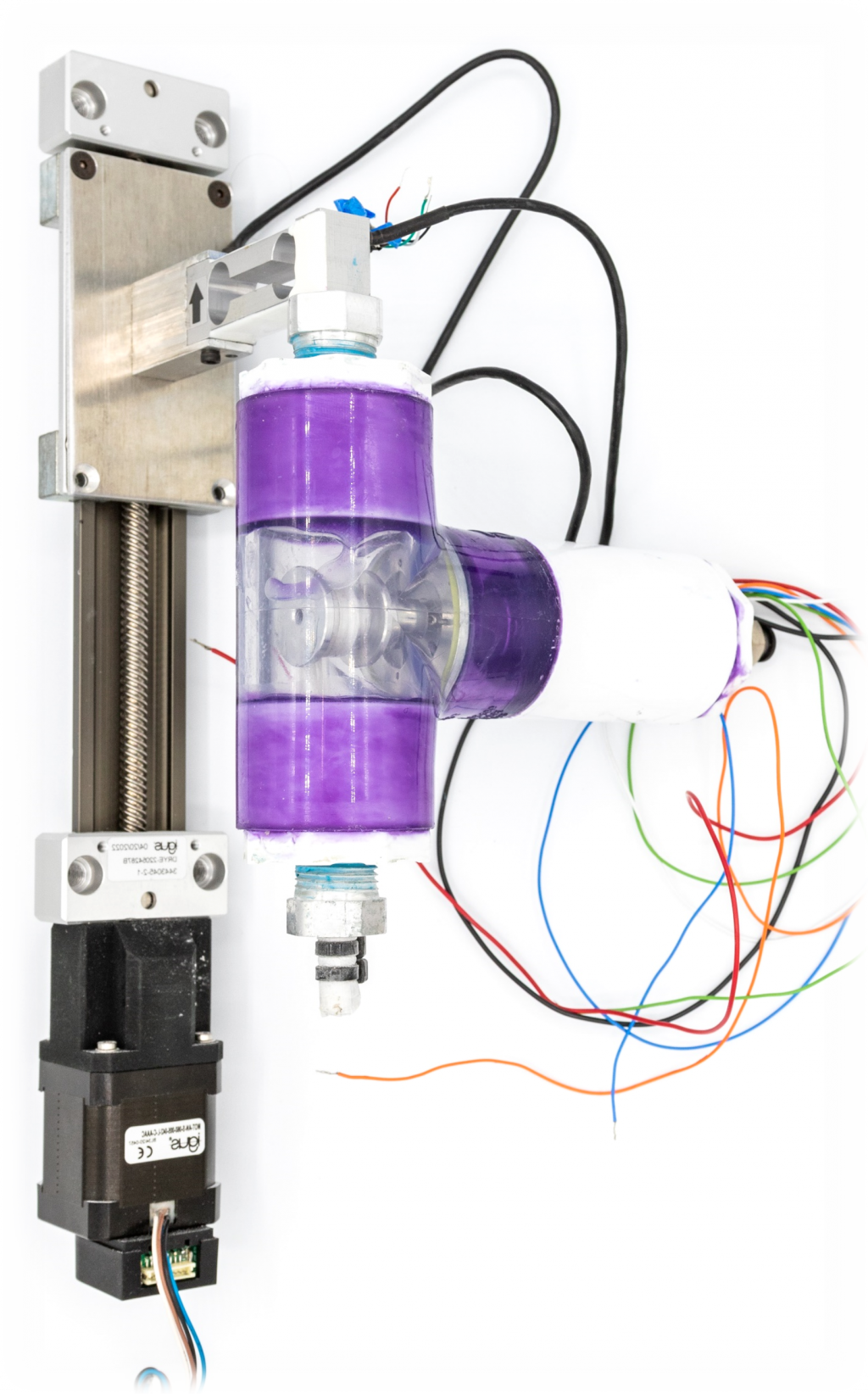
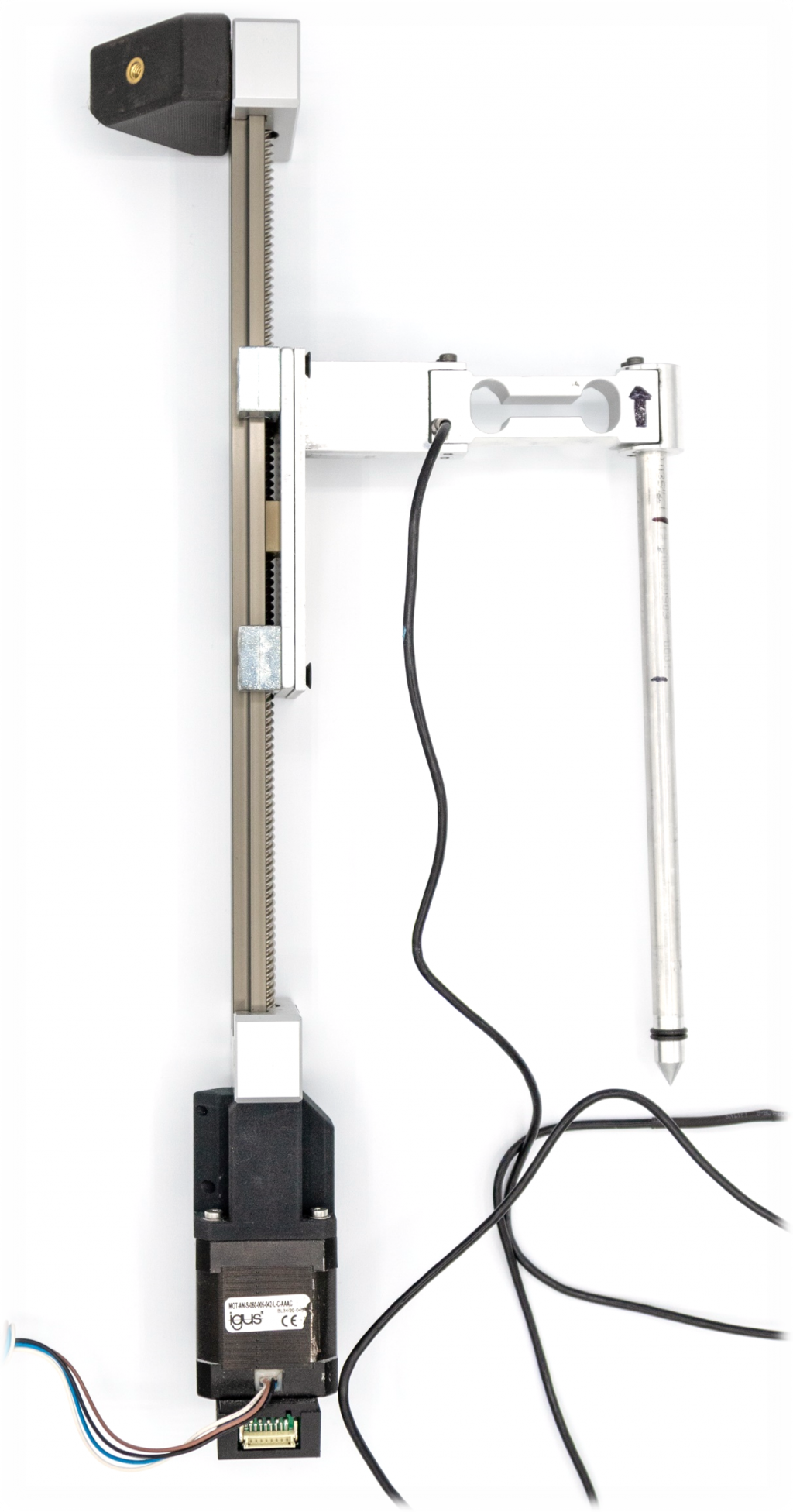
As our exploration of space continues, especially with NASA’s establishment of a long-term manned presence on the lunar surface with the Artemis program,there is a desire to build larger structures, and explore more treacherous landscapes. However, there are numerous challenges in these endeavors,one of which is securing structures and devices into the soils of the Moon and other astronomical bodies. Given the costs associated with launching large and/or heavy objects,an anchoring solution would have to be compact and light.Our team of eleven engineers is designing,building, and testing the Test of Robotic Intrusion in Low-g(TRILow-g), a payload that will demonstrate and measure the performance of a promising novel anchoring solution,based on pioneering soft robotics research done by our sponsor, Nicholas Naclerio and the Hawkes Lab at UCSB.Flying aboard a Blue Origin New Shepard capsule in early 2023, our payload will measure anchoring performance for both a soft robot and rigid intruder.Our system will consist of a tip-extending soft robot;a rigid penetrometer; a container storing a simulated lunar soil sample;an air supply to power the soft robot and prepare the soil sample;electronics and software to collect data and control the payload;and a structure to attach the rest of the components to the capsule.