Hespanha Lab F1TENTH Velma
Finding today, Creating tomorrow
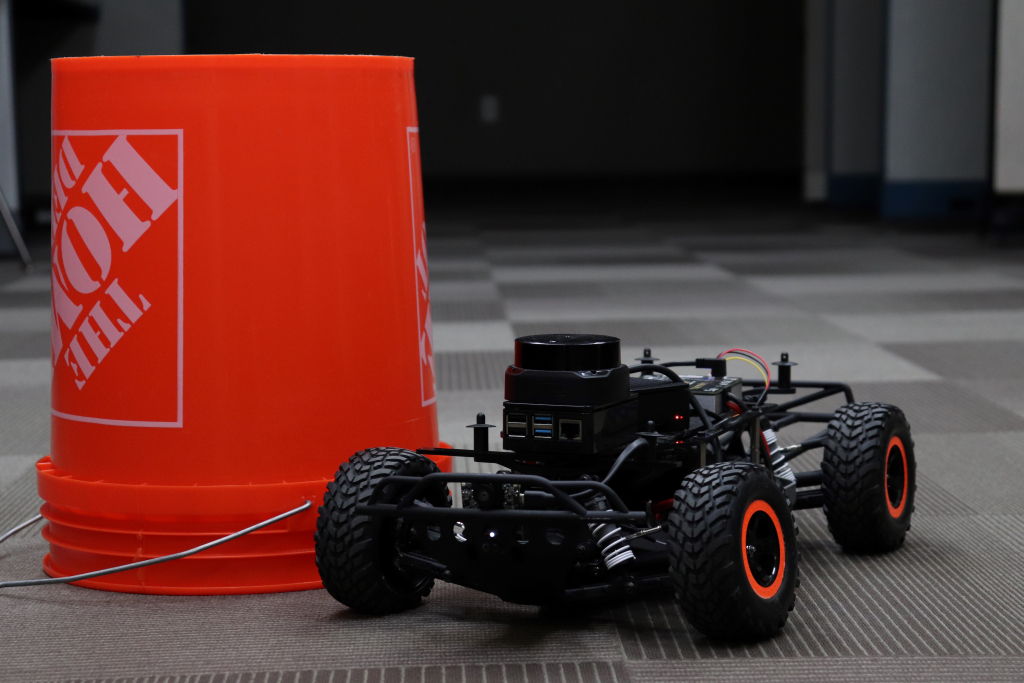
Description
Robotic autonomy is the direction of the future. Our VELMA robot can efficiently search an unknown environment and successfully find a color coded target object. With a Raspberry Pi as the computing unit, and Robot Operating System (ROS) serving as the framework, our software creates a map of the vehicle’s surroundings and avoids obstacles by leveraging simultaneous localization and mapping (SLAM) software combined with LiDAR data. Additionally, we fuse LiDAR scans with odometry data from the speed controller for improved localization. Using the generated map, an occupancy grid is populated with values based on multiple variables such as ease of accessibility, obstacles detected, potential targets detected, and more. The vehicle optimizes path trajectories based on these variables, and continuously updates the path until the target is detected using a Pixy2 color recognition camera. With this project, we enhance the utility of autonomous vehicles for search and identification.