Buckwalter / Madhow Lab FusionSense
Reliable Radar for Real-Time Results
Description
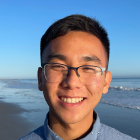
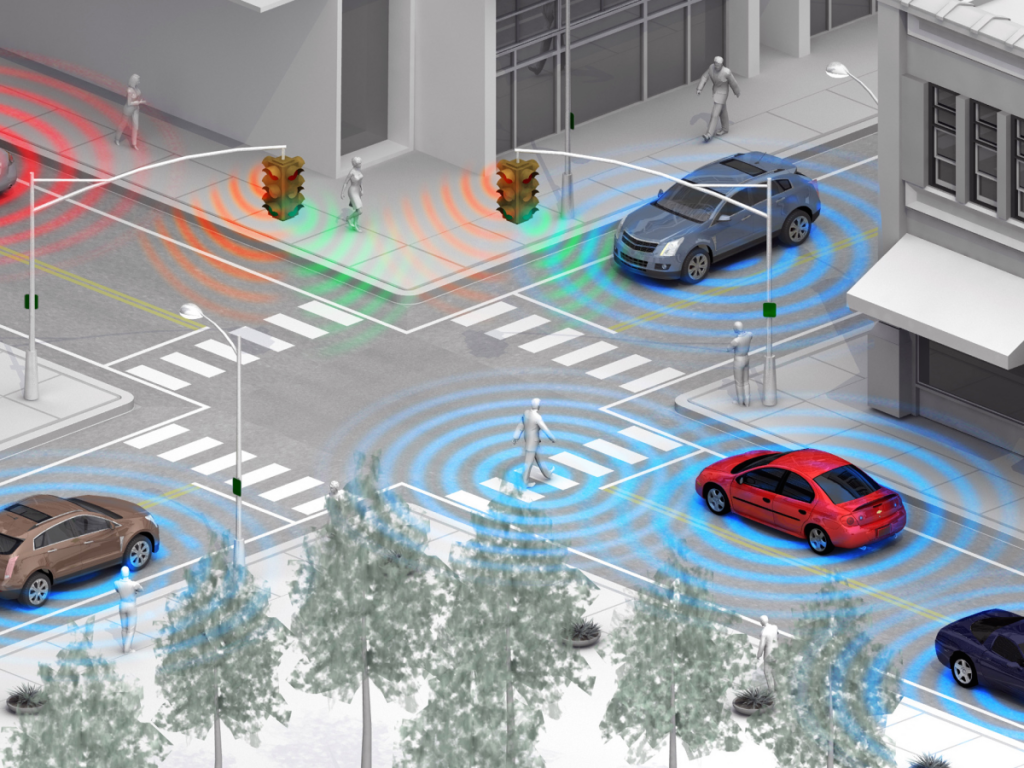
With increasing interest in time-space positioning applications such as autonomous vehicle and airspace safety, the issues of size and scalability are currently blocking the widespread implementation of new technologies. Millimeter wave (mm-wave) radar is poised to control this field for its small antenna size and relatively low cost-per-unit. However, the main weakness is its inability to record data beyond line-of-sight and velocities parallel to the antenna array. We propose utilizing numerous multiple-input multiple-output (MIMO) radar nodes to acquire real-time environmental data, conduct compute-heavy tasks on-board, and subsequently transmit the data to our server via wireless local area network (WLAN) connection for further object detection and scene fusion algorithms. Our setup enhances the powerful nature of mm-wave radar by alleviating its space-domain shortcomings using multiple radar nodes and increasing its time-domain accuracy by applying physics-informed analysis.